Methods for you to implement:
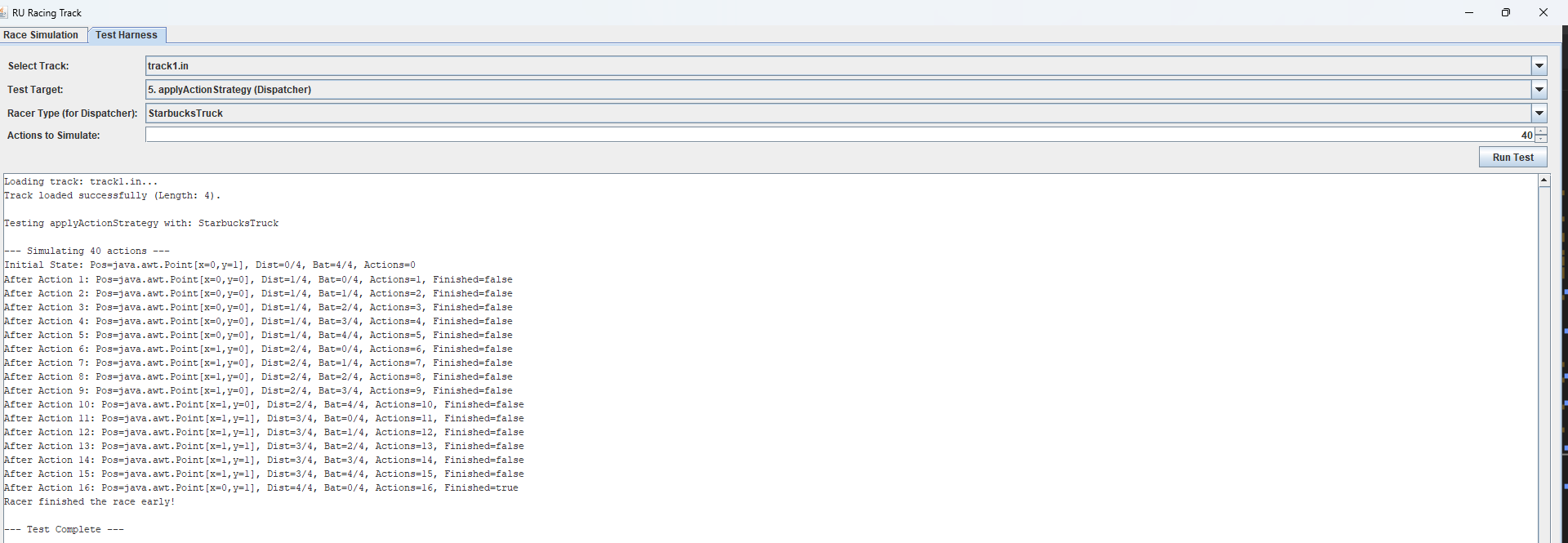
applyStarbucksTruckAction(Racer racer) – O(N²) Strategy
- Goal: Charge for N actions, then move 1 step. Repeat.
- Charge Time: N (Same as track length).
- Action Logic:
- Check if the battery is full using
getBattery()andgetChargeTime(). - If full: Move the racer forward by 1 step.
- If not full: Charge the battery.
- Check if the battery is full using
Testing:

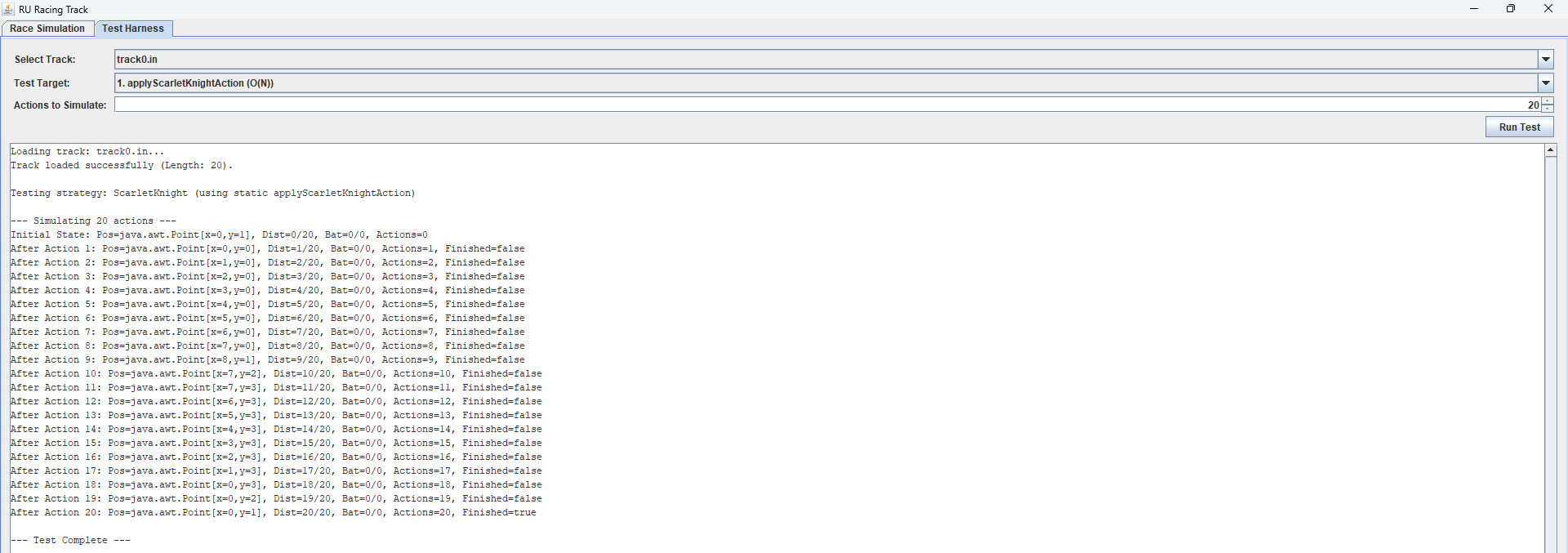
applyScarletKnightAction(Racer racer) – O(N) Strategy
- Goal: Move 1 step per action.
- Charge Time: 0 (No charging needed).
- Action: Move the racer forward by 1 step each action.
Testing:
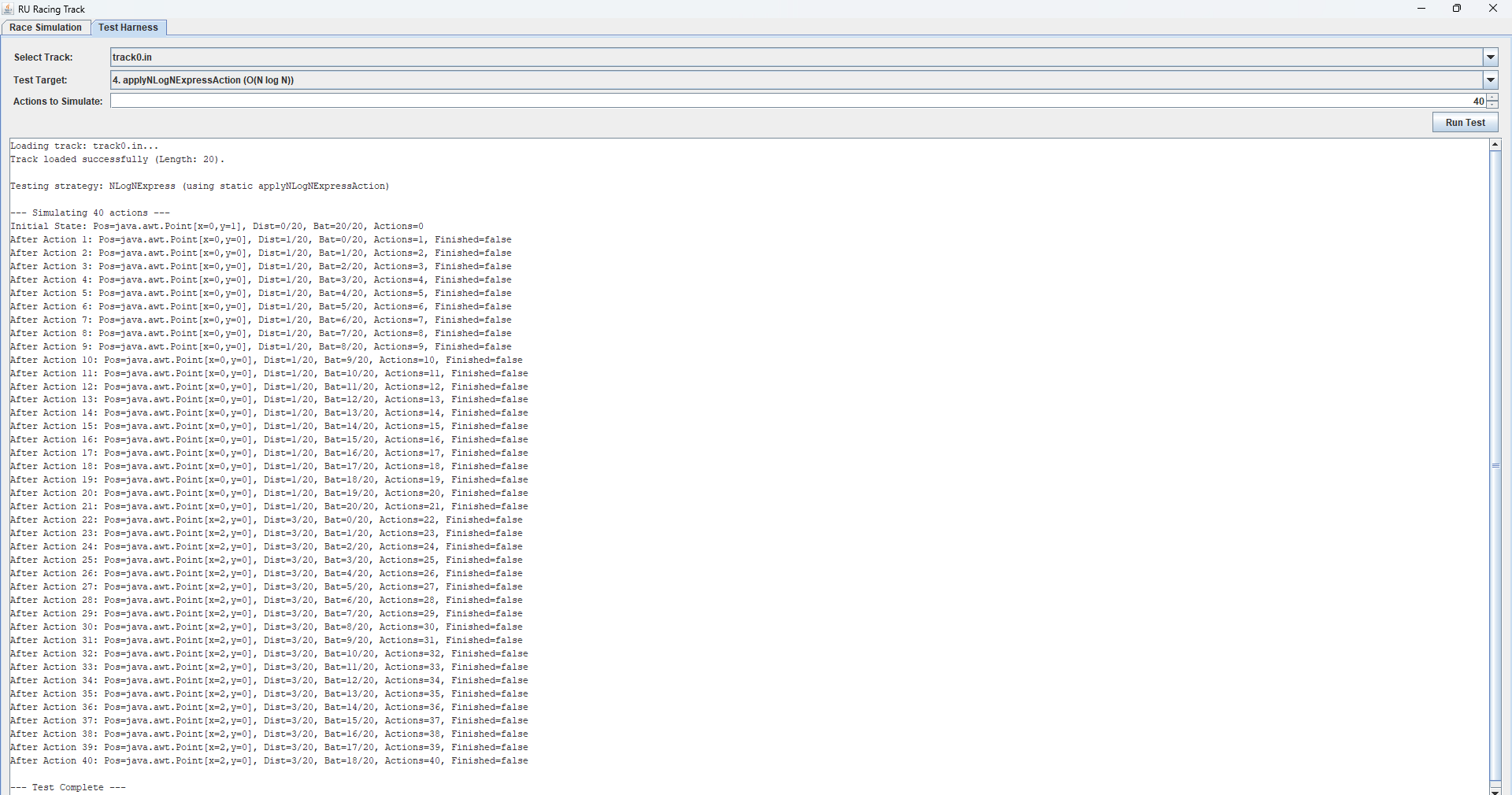
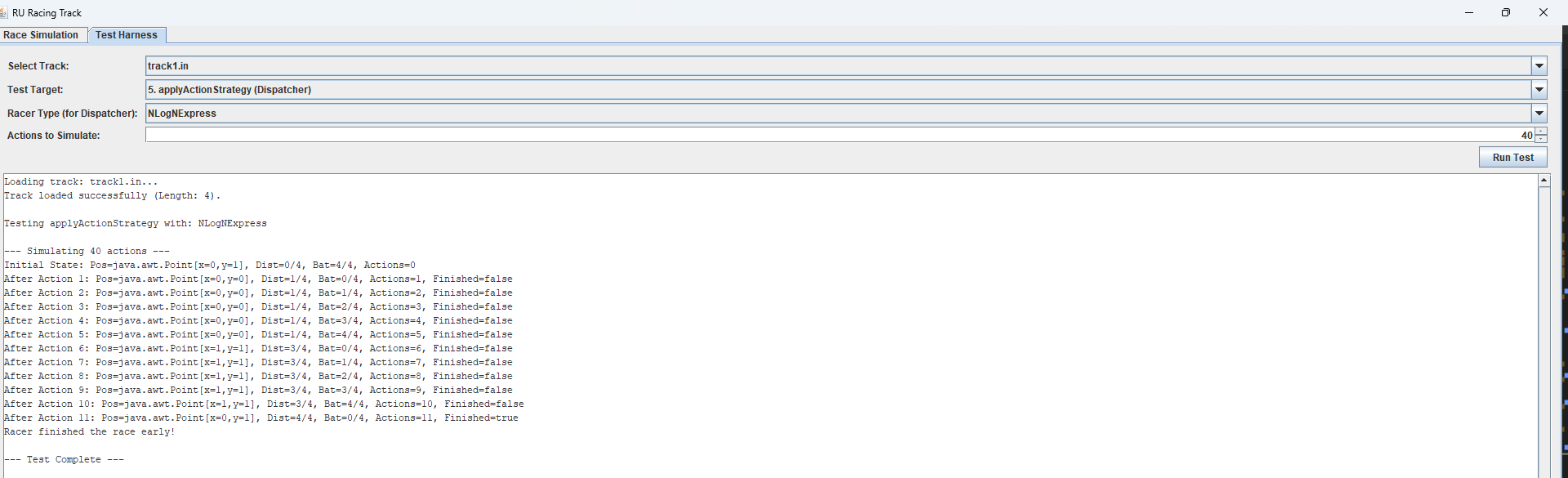
applyNLogNExpressAction(Racer racer) – O(N log N) Strategy
- Goal: Charge for N actions, then teleport distances of 1, 2, 4, 8, … (powers of 2). Repeat.
- Charge Time: N (Same as track length).
- Action Logic:
- Check if the battery is full using
getBattery()andgetChargeTime(). - If not full: Charge the battery.
- If full: Calculate the appropriate distance to move based on how many jumps have already been completed.
- UPDATED 4/21 5PM: To find the next jump look at the total distance a racer has already covered. We want to know roughly “2 raised to what power
kis close to the total distance traveled so far?”.- In Java,
Math.log(x)calculates the natural logarithm (base e). To get base-2 we use the standard math formulalog_2(x) = log(x) / log(2). - Calculating
(int) (Math.log(racerDistance) / Math.log(2))represents the exponent of the last power-of-2 jump completed. The(int)part just drops any decimal, giving us the whole number.
- In Java,
- Make sure the racer doesn’t move beyond the track length.
- Move the racer by the determined distance.
- Check if the battery is full using
Handle the case where the racer hasn’t moved yet separately (first jump should be distance 1).
Always ensure the racer moves at least 1 step when teleporting if it hasn’t finished the race yet.
Testing:
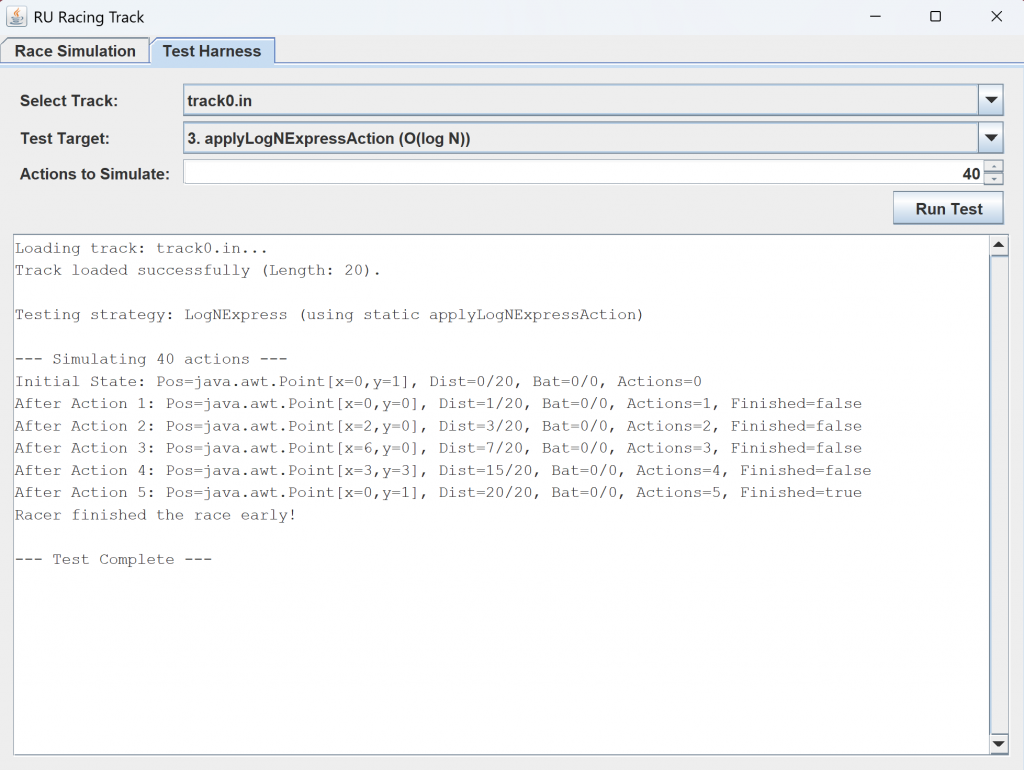
applyLogNExpressAction(Racer racer) – O(log N) Strategy
- Goal: Teleport distances of 1, 2, 4, 8, … (powers of 2) with no charging.
- Charge Time: 0 (No charging needed).
- Action Logic:
- Calculate the appropriate distance to move for this action, which should be a power of 2 based on which action it is.
- Make sure the racer doesn’t move beyond the track length by comparing the calculated distance with the remaining distance.
- Move the racer by the determined distance.
Always ensure the racer moves at least 1 step if it hasn’t finished the race yet.
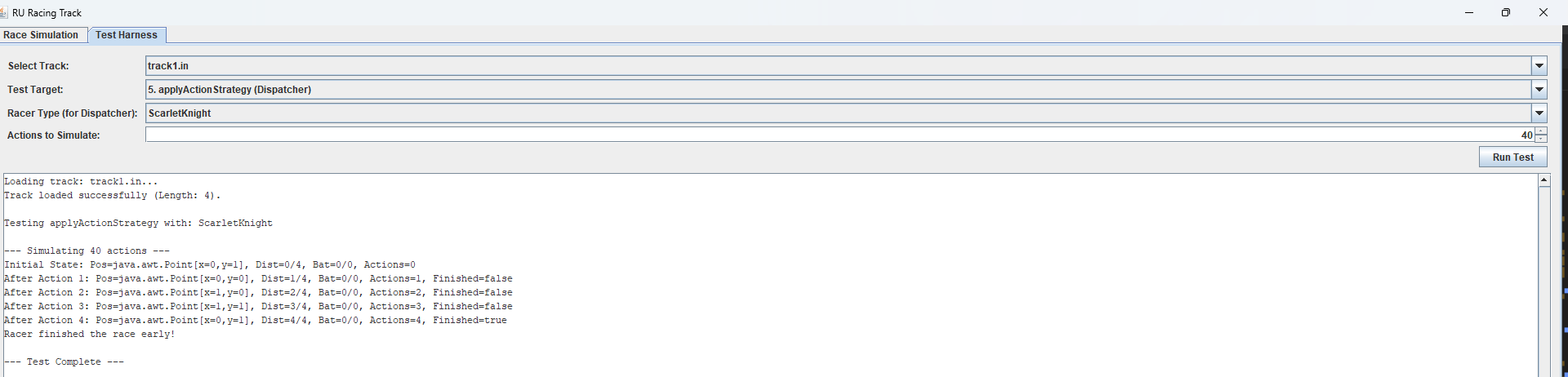
applyActionStrategy(Racer racer)
- This method determines which strategy to apply based on the racer’s name.
- Use a conditional structure (switch or if-else) to call the appropriate strategy method for each racer type.
- The racer names are: “ScarletKnight”, “StarbucksTruck”, “LogNExpress”, and “NLogNExpress”.
Testing: *this will test a combination of all the previous methods. Here are more examples

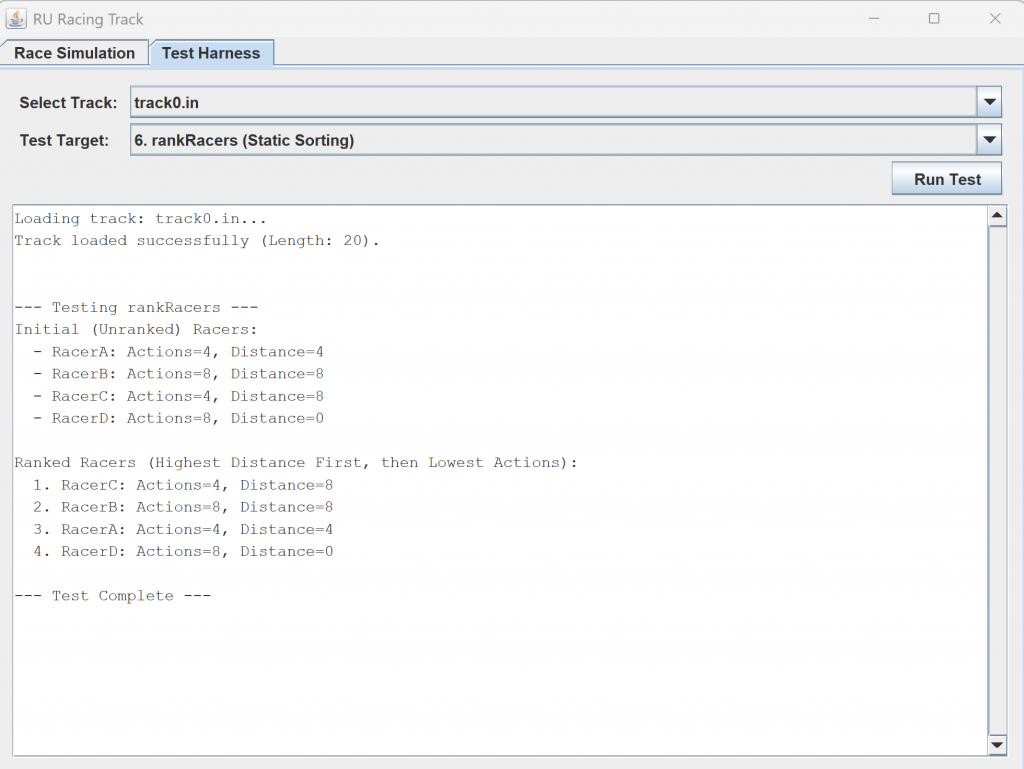
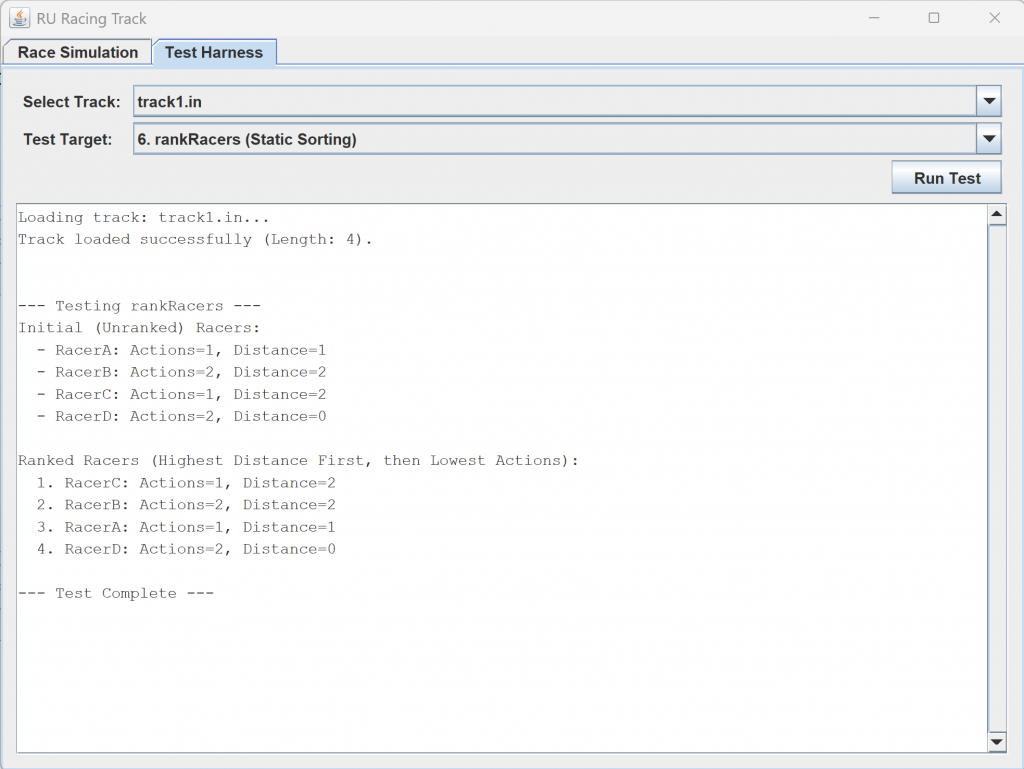
rankRacers(ArrayList racers)
- This static method sorts the provided list of racers based on their performance.
- Ranking Criteria:
- Primary: Greatest distance traveled
(getDistance())– Racers that traveled farther should be ranked higher - Secondary (Tie-breaker): Fewest actions taken
(getActionsCounts())– Racers with fewer actions should be ranked higher. *updated 4/22 @2pm
- Primary: Greatest distance traveled
- You can implement this using any basic sorting algorithm (insertion sort). One approach is to iterate through the list and reorder it based on the criteria above.
- You may want to the following Java:
racers.get(index)// gets the object at the specified index of the listracers.set(index, object)// sets the object at the specified index of the list
Testing: (updated 4/24)
simulateRace(long cutoff)
- This method contains the main simulation loop.
- Keep track of how many actions have been simulated.
- In each iteration of the main loop:
- Check if all racers have finished or if the maximum action count (
cutoff) has been reached. - For each racer that hasn’t finished, apply its action strategy using
applyActionStrategy. - Keep track of whether all racers have finished to know when to stop the simulation.
- Check if all racers have finished or if the maximum action count (
- After the simulation is complete, rank the racers using
rankRacersand return the result.
Testing:
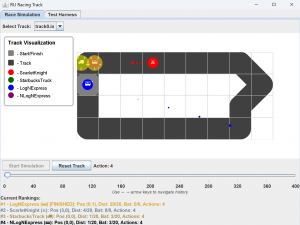
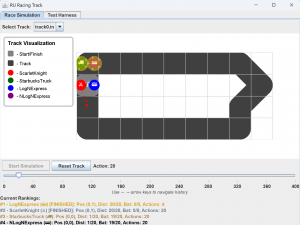
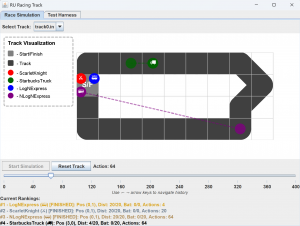
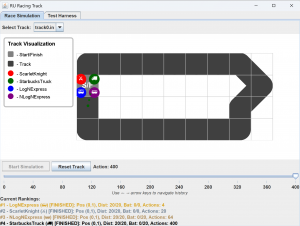
* To watch a video of the full simulation click *here*
You can see the racers move according to their runtime which is really cool!!!
Executing and Debugging
- You can run your program through VSCode or you can use the Terminal to compile and execute. We suggest running through VSCode because it will give you the option to debug.
- Test each method as you go with the directions under each method
- How to debug your code. You will have to create a launch.json file and configure it correctly (Run -> Add Configuration).
- If you choose the Terminal:
If you prefer to compile and run the project from the command line:
- Navigate to the Project Root: Open your terminal or command prompt and change the directory to the root folder of the
RURacingproject (the folder containing the source files and input files).cd path/to/RURacing - Compile: Use the
javaccommand.# Compile
javac *.java -encoding UTF-8Ensure you have a Java Development Kit (JDK)
- Run: Use the
javacommand.# Run
java Driver
- Navigate to the Project Root: Open your terminal or command prompt and change the directory to the root folder of the
- If you choose the Driver:
- Click the play button in the top right corner when you’re on the
Driverfile
- Click the play button in the top right corner when you’re on the
By Elian Deogracia-Brito, Tiara Clyde and Tanvi Yamarthy
